|
Minglun Wei I am a PhD student at Cardiff University, fully funded by the UK Engineering and Physical Sciences Research Council (EPSRC). I received my Master’s degree from The University of Edinburgh and my Bachelor’s degree from Northwestern Polytechnical University (NWPU). Prior to commencing my PhD, I worked in industry on research projects applying large language models (LLMs) to AI for science. My research focuses on robotic manipulation of deformable objects in real-world environments, with a particular emphasis on granular materials. This involves developing learning-based or optimisation-based frameworks, with the overall goal of enabling robots to perceive, model, and interact with such complex and highly dynamic materials. I am also interested in data-driven methods for learning surrogate models of dynamical systems. As a Capricorn (Capricorn sun, Aquarius moon), I enjoy working in a grounded and methodical way while also valuing creativity and innovation in my research. Please feel free to get in touch if you are interested in my work or potential collaborations. I am seeking full-time opportunities in academia or industry after my graduation in March 2027. Please feel free to contact me if my background aligns with your needs. |
|
Education
|
PublicationsMore in progress... |
|
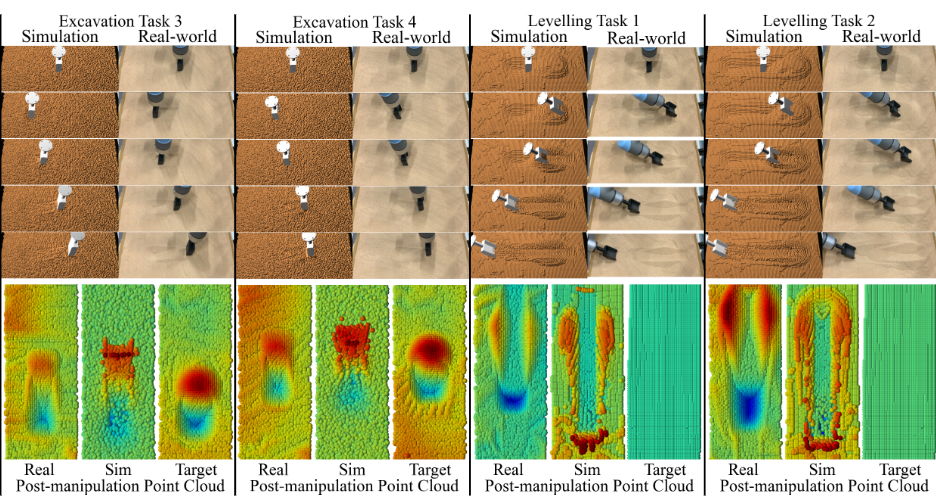
Celebi’s choice: causality-guided skill optimisation for granular manipulation via differentiable simulation
Minglun Wei, Xintong Yang, Junyu Yan, Yu-Kun Lai, Ze Ji International Conference on Intelligent Robots and Systems (IROS), 2025 IROS Robotic Manipulation of Deformable Objects Workshop, 2025 (Best Poster Finalist) paper / pdf / video We present Celebi, a method that integrates differentiable physics simulation with causal inference to achieve stable and efficient optimisation for robotic excavation and levelling tasks. |
|
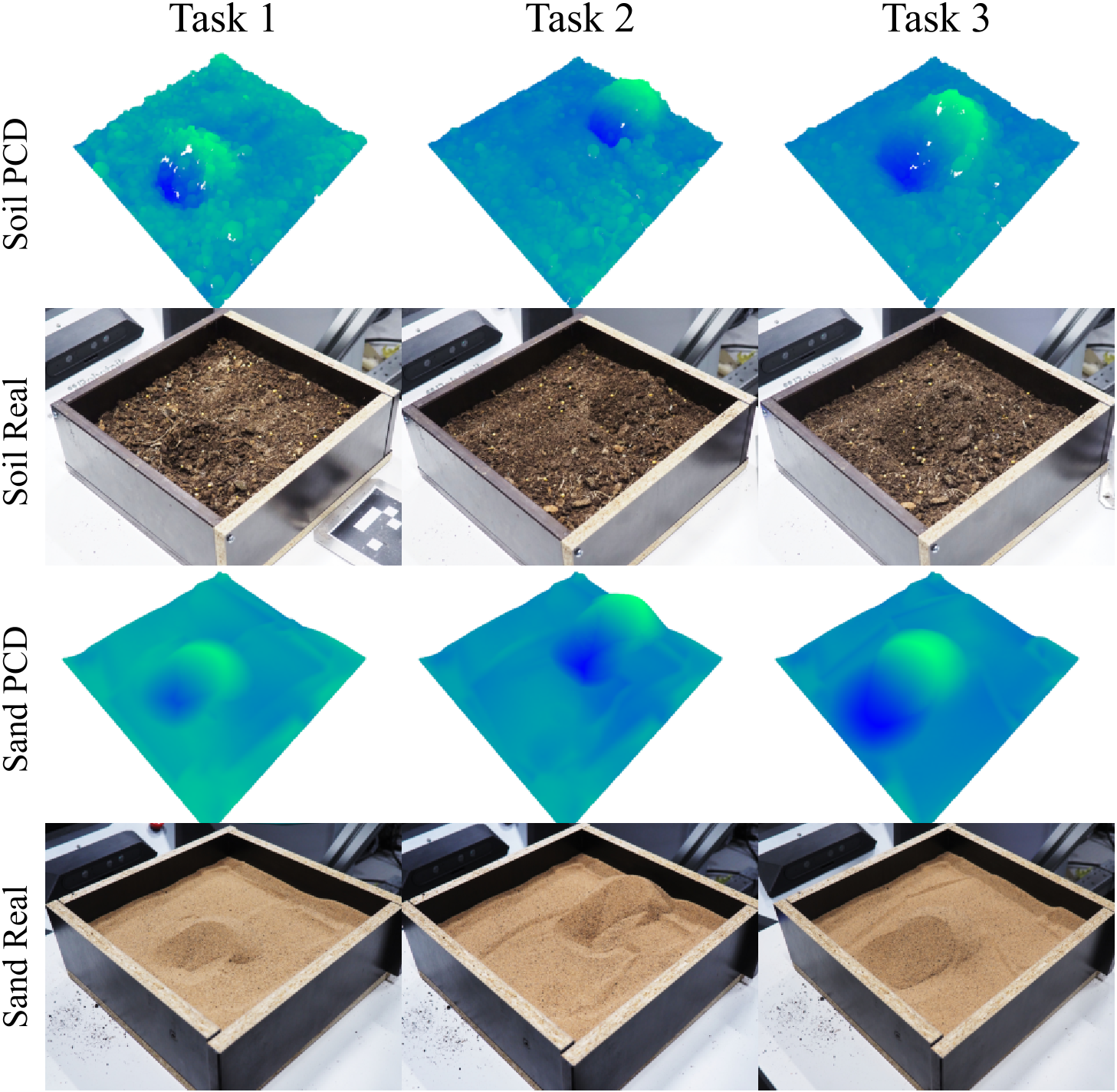
DDBot: Differentiable Physics-based Digging Robot for Unknown Granular Materials
Xintong Yang, Minglun Wei, Yu-Kun Lai, Ze Ji IEEE Transactions on Robotics (T-RO), 2025 paper / arxiv (with suppl.) / pdf / video We propose DDBot, a differentiable digging robot that enables high-precision and efficient manipulation of granular materials with unknown properties through GPU-accelerated differentiable simulation. |
|
A Physics-informed Demonstration-guided Learning Framework for Granular Material Manipulation
Minglun Wei, Xintong Yang, Yu-Kun Lai, Seyed Amir Tafrishi, Ze Ji IEEE Transactions on Neural Networks and Learning Systems (TNNLS), 2025 paper / arxiv / pdf We propose a demonstration-guided reinforcement learning framework with a differentiable simulator to enable robotic manipulation of granular materials. |

|
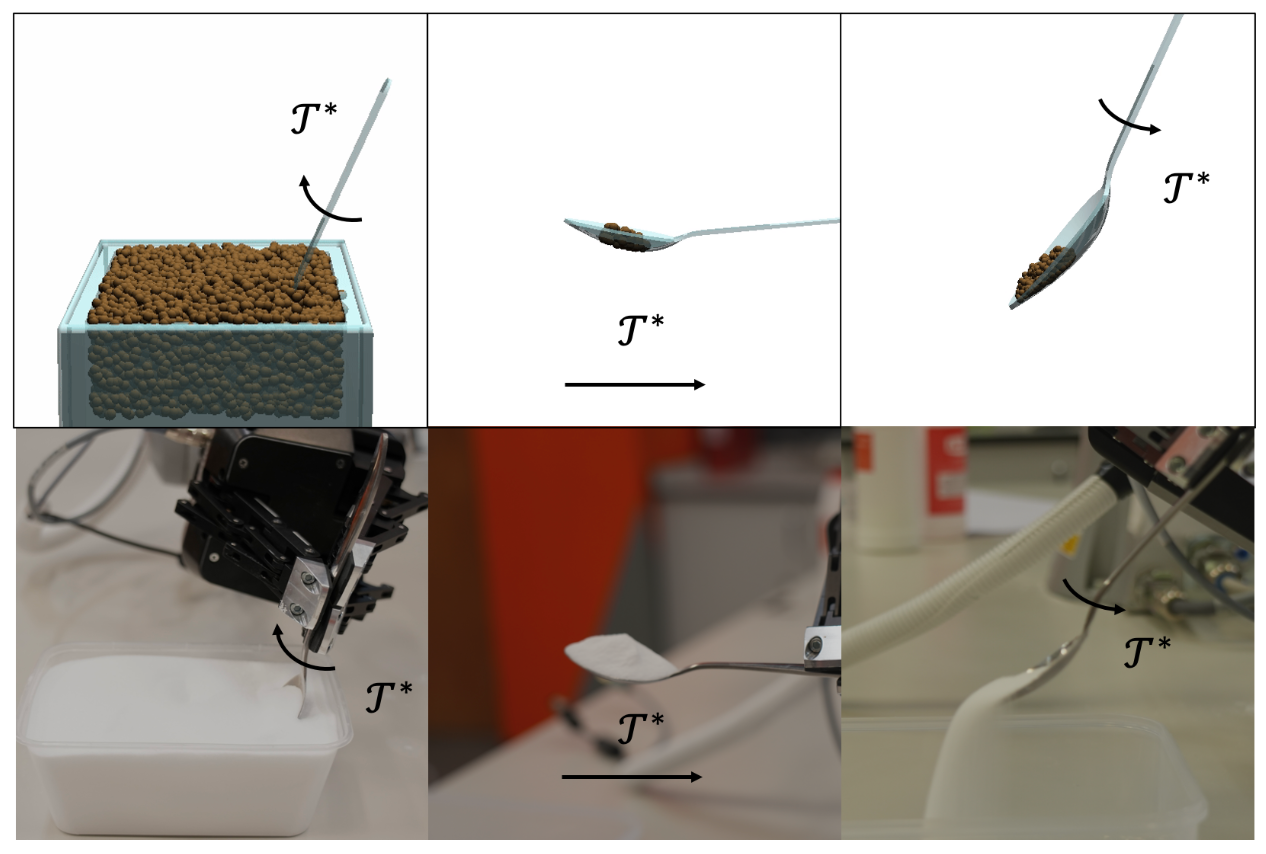
Differentiable Skill Optimisation for Powder Manipulation in Laboratory Automation
Minglun Wei, Xintong Yang, Yu-Kun Lai, Ze Ji IROS Embodied AI and Robotics for Future Scientific Discovery Workshop, 2025 arxiv / pdf We design a differentiable skill optimisation framework for robotic powder transport, enabling accurate and efficient manipulation in automated laboratory workflows. |
Academic ExperienceReviewer
Teaching Assistant
Research Assistant
|
Memberships & Fellowships
|
Scholarships
|
|
Template from Jon Barron. Last updated: Mar 2026. |